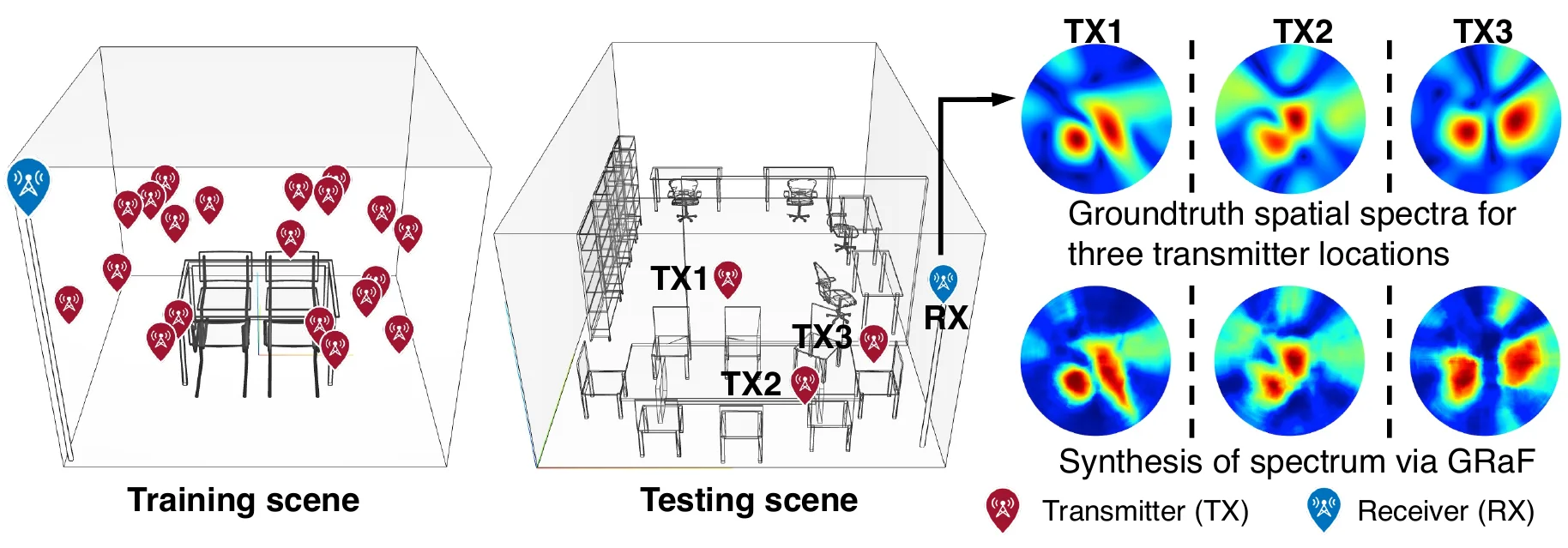
We present GRaF, Generalizable Radio-Frequency (RF) Radiance Fields, a framework that models RF signal propagation to synthesize spatial spectra at arbitrary transmitter or receiver locations, where each spectrum measures signal power across all surrounding directions at the receiver. Synthesizing spatial spectra is a fundamental capability for a broad range of wireless networking and sensing tasks, including indoor localization, beam management, and channel estimation. Existing neural radiance field (NeRF)-based methods can produce high-fidelity spectra but must be retrained from scratch for every new scene, which severely limits their scalability and practical deployment.
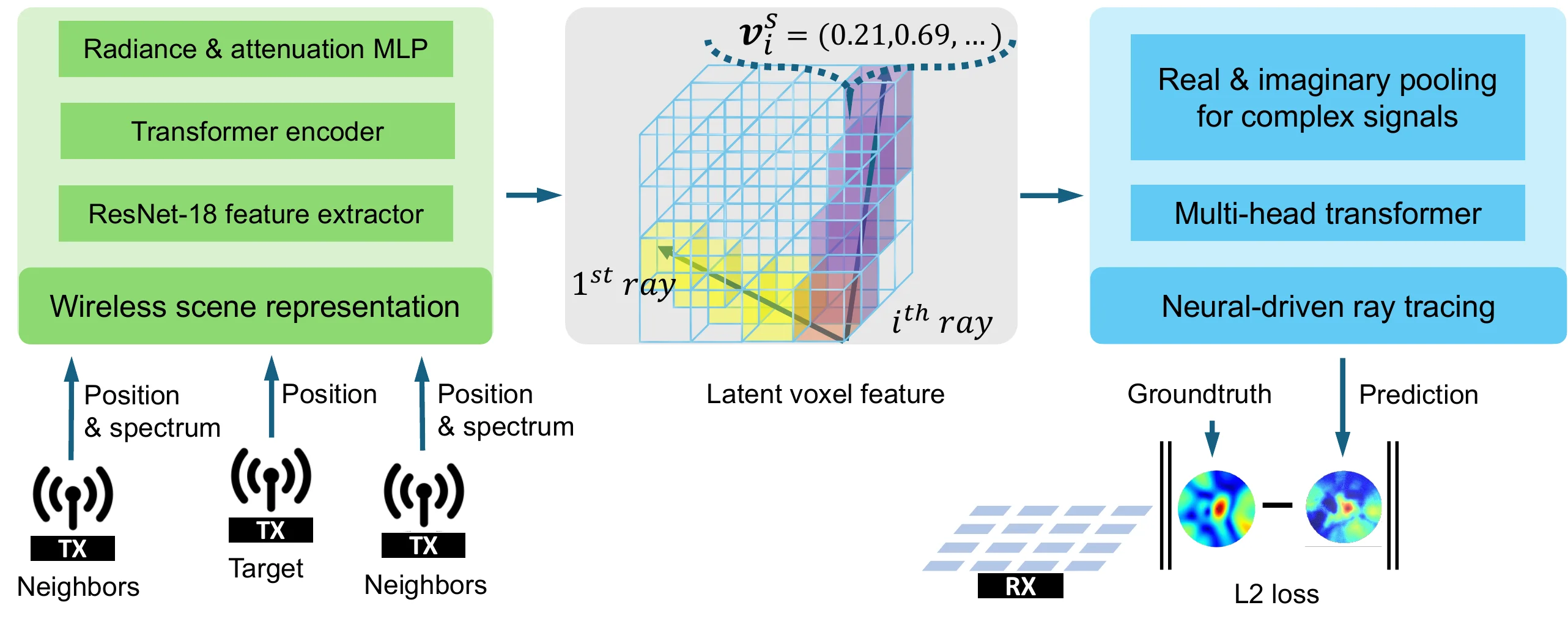
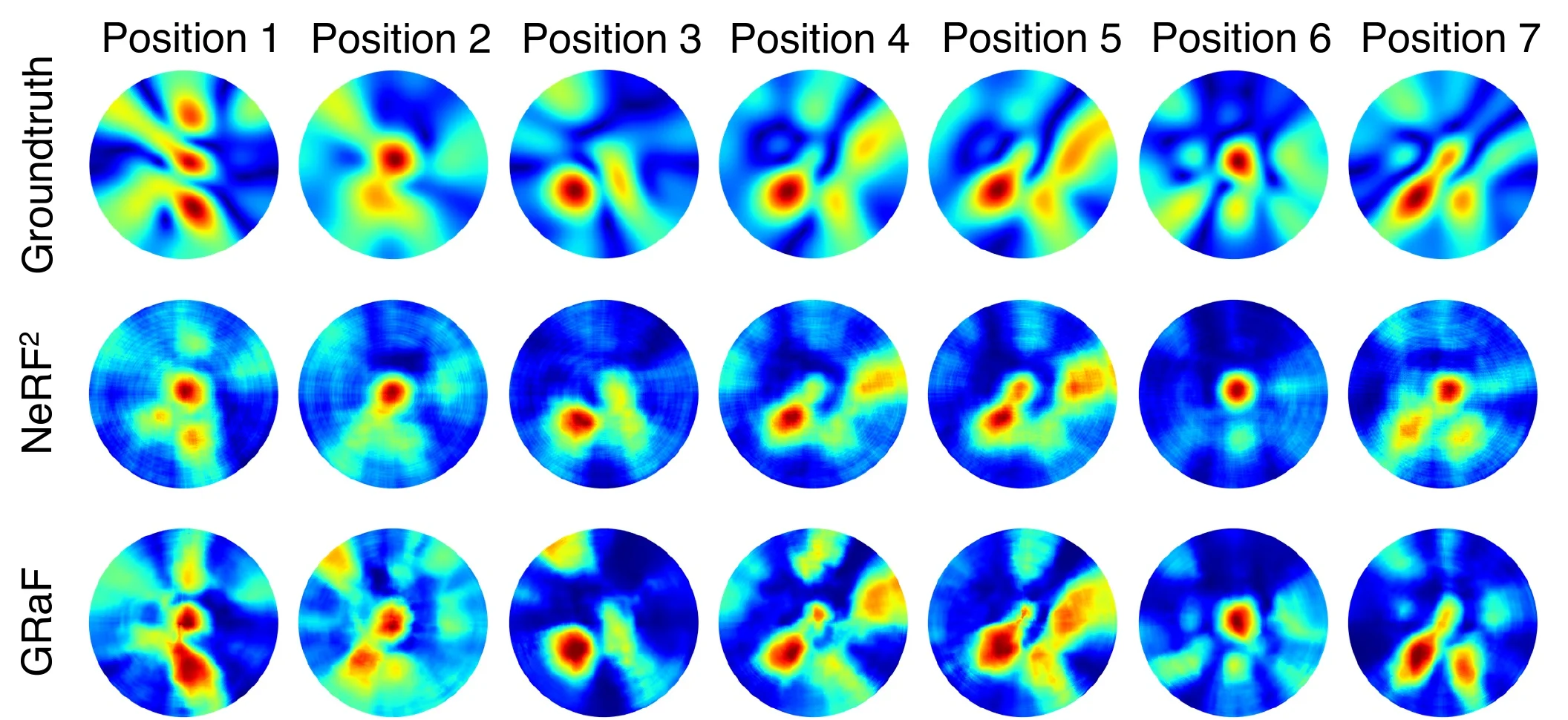
GRaF achieves generalization by exploiting an interpolation theory: the spatial spectrum at a target transmitter can be well approximated using spectra from a small set of geographically proximate transmitters. Two key components realize this idea: (1) a geometry-aware Transformer encoder that captures spatial correlations among neighboring transmitters to learn scene-independent latent representations, and (2) a neural ray tracing algorithm that, given the latent representations, estimates the spatial spectrum at the receiver by aggregating directional contributions along rays. Across multiple wireless technologies and environments, GRaF generalizes to previously unseen scenes while preserving the synthesis quality of state-of-the-art per-scene methods, and substantially reduces the deployment cost.